专业解读《Light》封面:可调谐混合超表面(THCMs)如何革新下一代LiDAR系统
华中科技大学与清华大学联合团队在《Light: Science & Applications》发表突破性研究成果,开发出基于机械可调谐混合超表面(THCMs)的双模式激光雷达系统。该系统通过偏振控制实现扫描与闪光模式自由切换,扫描模式下视场达±35°、角分辨率0.3°,闪光模式支持快速全景成像。创新性提出先闪后扫自适应探测机制,有效平衡精度与效率,在自动驾驶、AR、工业检测等领域具有重要应
前言
近日,来自华中科技大学、清华大学等机构的联合科研团队在光学顶尖期刊《Light: Science & Applications》https://doi.org/10.1038/s41377-025-01999-4上发表了一项具有重大应用前景的研究。他们成功研制出一种基于机械可调谐混合超表面(THCMs)的双模式激光雷达系统,实现了扫描与闪光两种工作模式的自由切换,极大提升了三维环境感知的灵活性与效率。
核心突破
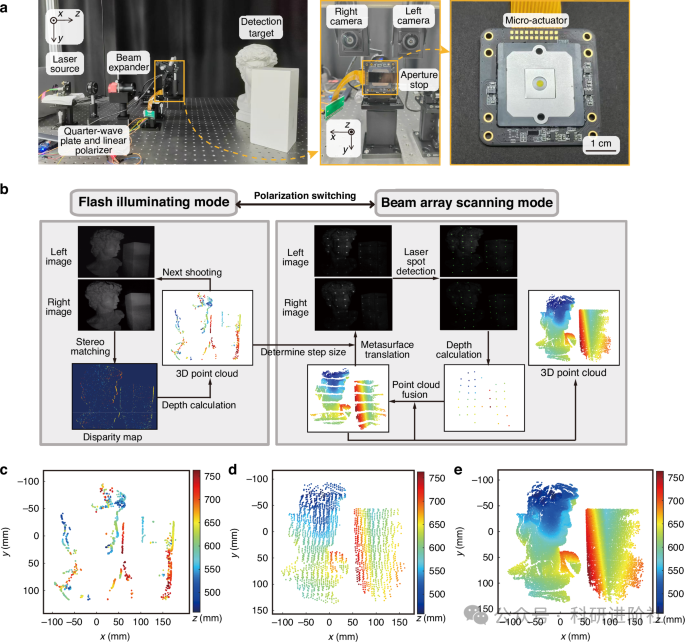
通过偏振控制切换模式:左旋圆偏光触发多光束扫描模式,右旋圆偏光启动宽场闪光模式,无需复杂机械结构;
扫描模式下可实现±35°视场、0.3°角分辨率的高精度探测,微位移控制精度达微米级;
闪光模式下实现大范围均匀照明,适用于快速全景成像与目标初识别;
提出“先闪后扫”自适应探测机制,提升系统在复杂环境中的响应效率与资源利用率。
研究意义
这项研究不仅解决了传统LiDAR在“精度”与“效率”之间的固有矛盾,还提出了一套自适应感知策略:先通过闪光模式快速识别目标,再依据场景复杂度切换至不同分辨率的扫描模式,实现智能化的三维重建。
该技术极具潜力应用于:
自动驾驶:提升复杂路况下的实时感知与响应能力;
无人机与机器人导航:实现高效率、高精度的环境建模;
增强现实(AR)与消费电子:支持更精准的虚实交互与手势识别;
工业检测与智能安防:用于快速三维测量与监控。
结语
这项跨学科合作不仅展示了超表面技术在光电系统中的强大能力,也标志着我们向“更智能、更集成、更自适应”的新一代感知系统迈出关键一步。未来,随着微纳加工与集成光学技术的进一步发展,此类LiDAR系统有望成为智能设备的“标准视觉能力”,赋能万千场景。
图1:采用可调谐混合级联超表面(THCMs)的双模式3D探测示意图
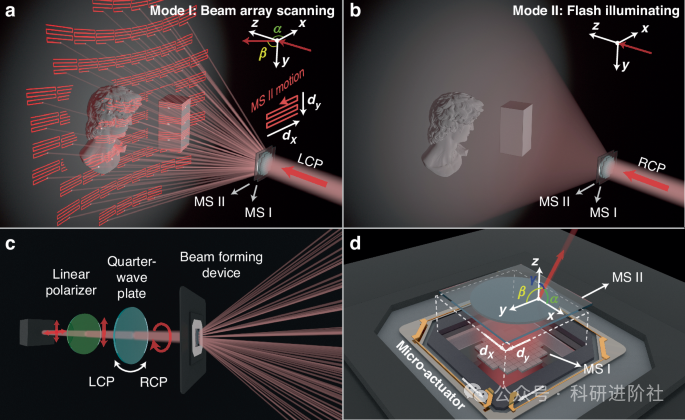
图2:MSI与MSII的单元结构及相位设计,以及光束阵列扫描模式与闪光照明模式的示意图
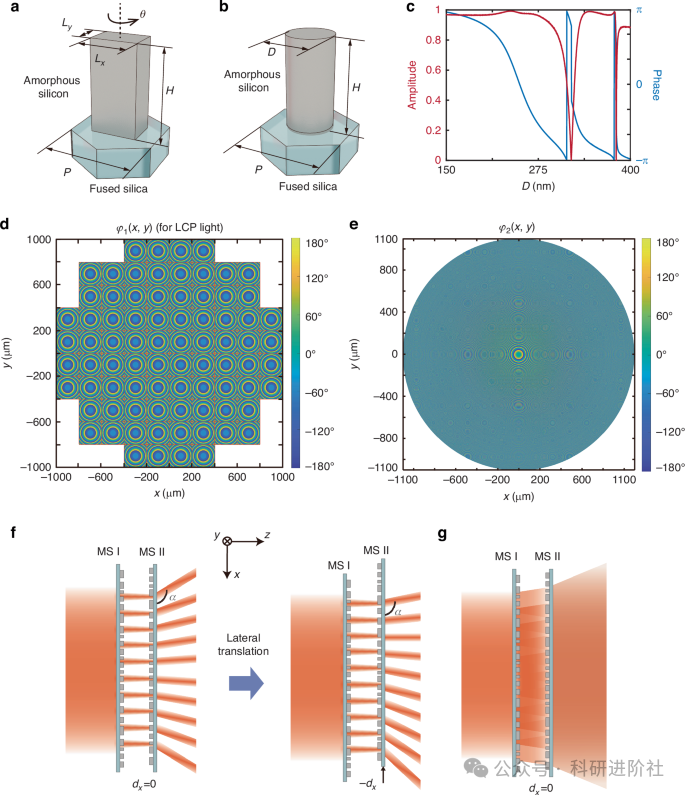
图3:制备的可调谐混合级联超表面(THCMs)及其双模式响应特性的表征
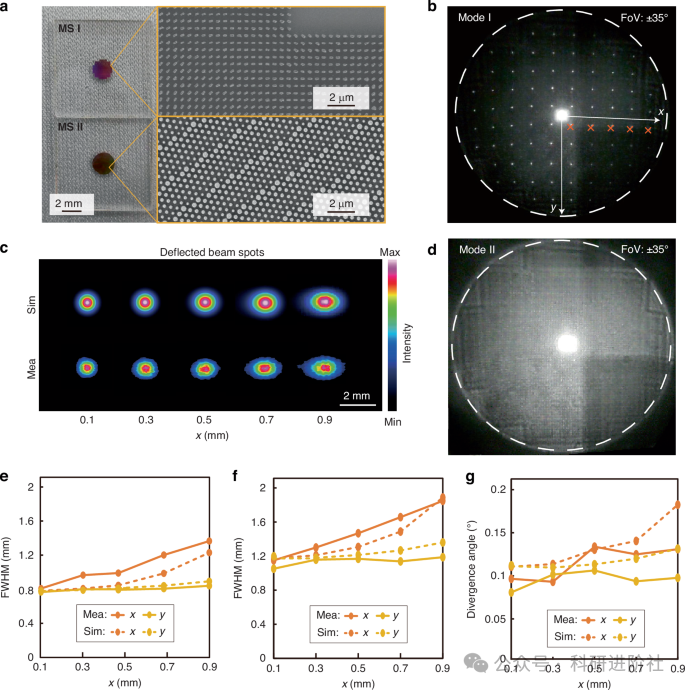
图4:基于所提出的LiDAR系统的三维感知
【注】小编水平有限,若有误,请联系修改;若侵权,请联系删除!

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐


 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)