2024 开放原子开发者大会人形机器人分论坛 | 从算法到实践:基于MPC与WBC的人形机器人运动控制的实现(下)
上篇文章概述了人形机器人运动控制技术的发展历程和现状,讲解了基于MPC与WBC的运动控制算法框架。国地中心已将该传统控制框架成功部署于实物,并开源了相关项目在 OpenLoong 动力学控制仓库中。本文将介绍 OpenLoong 动力学控制仓库的相关内容,展示仓库的讨论度与开发者案例,并对常见问题进行分析。
前言:书接上回,上篇文章概述了人形机器人运动控制技术的发展历程和现状,讲解了基于MPC与WBC的运动控制算法框架。国地中心已将该传统控制框架成功部署于实物,并开源了相关项目在 OpenLoong 动力学控制仓库中。本文将介绍 OpenLoong 动力学控制仓库的相关内容,展示仓库的讨论度与开发者案例,并对常见问题进行分析。
下面是对马老师演讲第三、四部分内容的整理:
3、OpenLoong 动力学控制开源仓库
3.1 OpenLoong-dyn-control 开源仓库简介
OpenLoong 动力学控制开源仓库是基于 MPC 与 WBC 的人形机器人运动控制框架,可部署于常见腿部构型的双足机器人上进行运动控制。控制框架代码仓库地址:https://atomgit.com/openloong/openloong-dyn-control.git
开源仓库的内容主要包括以下几个方面:核心算法、基于 Pinocchio 的动力学接口以及基于 Mujoco 的仿真接口,这些都进行了良好的封装。即使大家不需要整个框架,也可以方便地取用其中的某一部分。
仓库有三个特点,一是易部署,集成了主要第三方库依赖,简化部署过程。二是可扩展,框架结构分层模块化设计,为二次开发提供了友好的环境。三是易理解,针对功能进行代码模块封装,降低代码复杂度,提高可理解性。
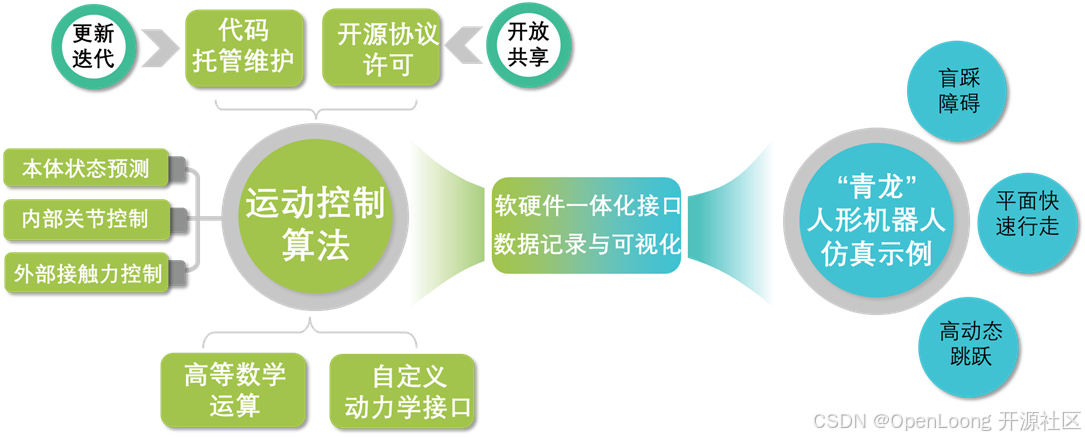
团队基于 “青龙”机器人模型,提供了行走、跳跃、盲踩障碍物三种运动示例,同时已在实物样机上实现了行走、盲踩障碍两种运动。

3.2 仓库热度与用户活跃度
仓库开源到现在几个月以来,仓库热度与用户活跃度都比较高。截至目前,仓库累计收到 86 项 Issue 提问,累计互动数180+,已成为开放原子热门项目;在各平台吸引了众多机器人控制领域的技术爱好者参与,在 Bilibili、CSDN 等技术分享平台,都有博主对该开源代码进行测试,发布实践经验,同时贡献 demo;部分用户已基于开源代码成功实现了不同构型机器人的实物部署,验证了其通用性。

OpenLoong 项目团队致力于与开发者建立互动协作的关系。通过线下的分享会等形式,OpenLoong 开源社区为大家提供技术支持,并分享一些技术细节。同时,团队也非常重视大家反馈的测试意见和优化建议。在仓库更新日志中,有一个贡献者名单,记录了所有为 OpenLoong 动力学仓库提出过优化意见和做出贡献的开发者,以此激励大家积极参与社区协作。
下面分享几个比较典型的开发者案例:
案例一:Mujoco 某一传感器接口索引号存在错位问题,导致数据采集不准确;
案例二:MPC与WBC计算中涉及了大量矩阵,而 release 编译模式会掩盖了部分维数不匹配问题;
案例三:社区成员提供了上楼梯 Demo,展示了算法在复杂环境中的应用,验证了其实际效果;
(大家如果用代码测试出比较好的 demo 也可以联系我们,可以放到仓库里面来。)
3.3 常见问题分析
针对开发者提出的大量问题,团队进行了分类与统计,归纳出7类主要问题,并通过数据分析揭示了开发者的关注重点。其中,关于算法原理的问题最多,表明开发者对算法的理论背景和应用细节有强烈兴趣。对此,团队计划在OpenLoong 开源社区定期发布算法讲解文章,以更好地满足开发者的学习需求。其次,关于更换模型的问题也较多,反映出开发者对算法在不同场景下的迁移和适配能力非常关注。通过这些数据与分析,我们能够更好地把握开发者需求,并优化开源仓库的使用体验,同时也欢迎开发者持续关注并提出更多宝贵建议!
团队将进一步完善相关文档和工具,提高算法的可用性和扩展性,团队希望代码不仅适用于青龙机器人,也能适用于其他构型的机器人,这也是 OpenLoong 开源社区的目标。为此,团队将完善模型更换的文档,降低代码迁移的复杂度。
为提升代码的性能与实用性,进行了多次重要优化和功能迭代。这些改进旨在更好地适配实物模型、优化算法效果以及提升用户体验。随着代码的不断优化和迭代,系统的性能和可操作性得到了显著提升,未来将继续聚焦于降低更换模型的复杂度与扩展应用场景,进一步满足开发者的需求。
4、总结展望
今年,关于传统控制是否仍有必要研究的问题经常被提及。尽管具身智能日益火热,基于学习的控制方案的应用也日益广泛,但基于基础机理的控制研究仍应受到重视和发展。因为只有深入理解模型和机理,才能更长足地提升机器人的性能。前面提到的 ASIMO 和 Atlas ,他们卓越的控制性能就印证了这一点。
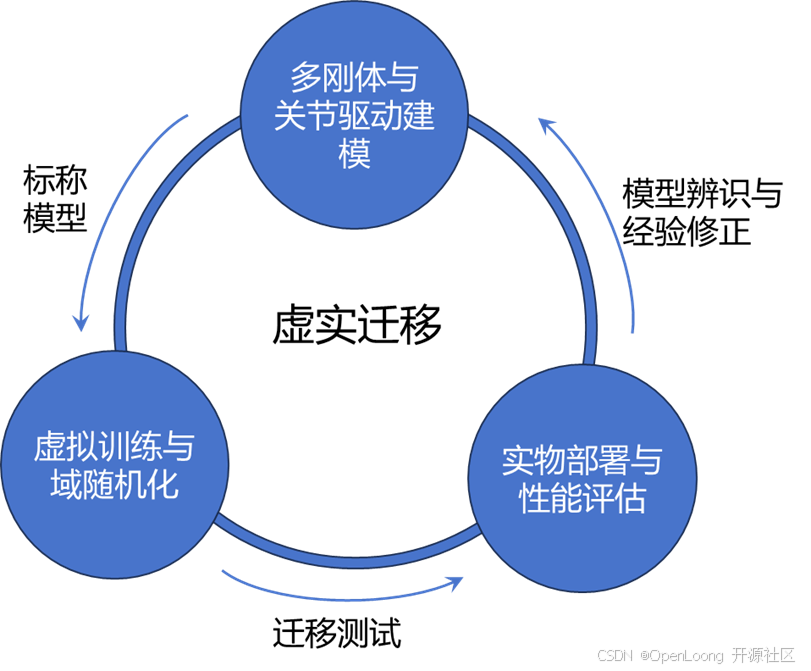
从具身智能的角度来看,随着机器人本体厂家的增多,本体的迁移性和仿真效果的对应性可能成为下一个竞争焦点。要实现这一目标,仍需依靠机理分析和传统控制研究。从具身智能产品的开发流程上来看,大概是分为三个步骤,建模,训练和预随机化,实物部署与性能评估,其中虚实差异对模型迁移效果影响较大。在 sim2real 方面,面向机理的研究将助力强化学习方法弥补虚实差异,提高迁移效果,更大程度释放硬件本体性能。
因此,希望大家继续关注机理建模和传统控制的研究,因为这是机器人发展长期伴随的研究方向。
最后,向大家汇报一下青龙团队近期取得的两个成果:一是通过传统控制实现了弯腰搬箱子和自主导航,整个过程无需遥控器干预,机器人能自主从一点走到另一点并搬运物品;二是通过强化学习实现了跑步。自7月份WAIC青龙机器人发布以来,团队一直在进行功能和算法的迭代开发,欢迎大家持续关注我们的成果和进展。

OpenLoong开源社区介绍
“OpenLoong”是一个全球领先的综合性人形机器人开源社区。社区秉持着技术驱动和开放透明的价值观,致力于汇聚全球开发者,共同推动人形机器人产业的发展,为全球人形机器人产业赋能。
我们的使命是通过在机器人本体技术、平台软件、具身智能、具身数据集以及上层应用等多个方面做出重大贡献,从而推动整个产业的进步。
注册成为 OpenLoong 开源社区的一员,与机器人研究者和爱好者共同开启人形机器人探索之旅!
注册地址:OpenLoong

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐


 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)