


定位
大多数时候,使用GPS来进行定位,但是GPS对于无人车来说还不够精确。

因此必须找到另一种方法来更准确地确定车辆在地图上的位置。最常用的方法是将汽车传感器所看到的内容与地图上所显示的内容进行比较。
车辆传感器可以测量车辆与静态障碍物之间的距离。我们在车自身的坐标系中测量这些距离以及这些静态障碍物的方向。在车的坐标系中,汽车的前进方向始终向前,坐标系正方向始终与车头保持一致,但不一定与地图坐标系保持一致。
当车辆传感器测量到地图上的物体,会将传感器的地标观测值,与地标在地图上的位置匹配,转换到地图自带坐标系,反之亦然,从而达到地图与车感数据的对比。

定位方法
gnss
GPS是英文Global Positioning System(全球定位系统)的简称。
利用GPS定位卫星,在全球范围内实时进行定位、导航的系统,称为全球卫星定位系统,简称GPS。
GPS是由美国国防部研制建立的一种具有全方位、全天候、全时段、高精度的卫星导航系统,能为全球用户提供低成本、高精度的三维位置、速度和精确定时等导航信息,是卫星通信技术在导航领域的应用典范,它极大地提高了地球社会的信息化水平,有力地推动了数字经济的发展。
RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
这是一种新的常用的卫星定位测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新的测量原理和方法,极大地提高了作业效率。

GNSS的全称是全球导航卫星系统(Global Navigation Satellite System),它是泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统)等,还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系统、多层面、多模式的复杂组合系统。
惯性导航
假设一辆汽车正以恒定速度直线行驶,如果提供了汽车的初始位置、速度、行驶时长,那么汽车的位置即从初始位置开始,然后速度乘以时间。
假如给予一辆汽车的初始速度,并给予加速度和驾驶时间,就可以使用加速度、初始速度、初始位置来计算汽车在任何时间点的车速和位置。
惯性测量单元(IMU)可以以高频率更新,可达 1000 赫兹,IMU 可以提供接近实时的位置信息。但缺点在于其运动误差随时间增加而增加,我们只能依靠惯性测量单元在很短的时间范围内进行定位。
但是我们可以结合 GPS 和 IMU 来定位汽车,一方面 IMU 弥补了 GPS 更新频率较低的缺陷。另一方面 GPS 纠正了 IMU 的运动误差。但是即使将 GPS 和 IMU 系统相结合也不能完全解决定位问题,比如我们在山间行驶或城市峡谷中或在地下隧道中行驶,那么可能长时间没有 GPS 更新。

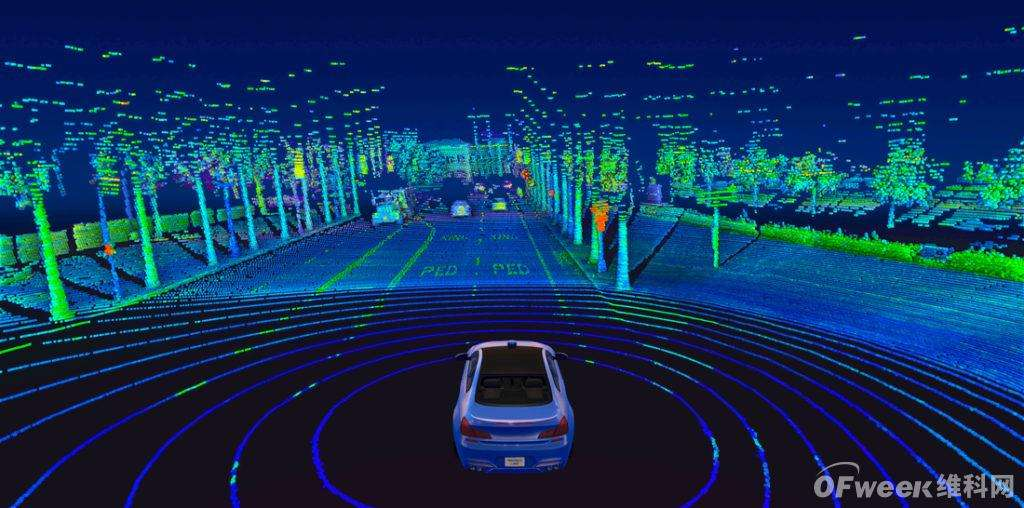
激光雷达定位
利用激光雷达,可以通过点云匹配来对汽车进行定位。该方法将来自激光雷达传感器的检测数据与预先存在的高精地图之间匹配,通过这种比较可获知汽车在高精度地图上的全球位置和行驶方向。
匹配点云有多种方法,比如迭代最近点(ICP)就是一种方法。对于第一次扫描中的每个点,需要找到另一次扫描中最接近的匹配点。最终会收到许多匹配点对, 把每个点的距离误差相加,然后计算平均距离误差。假设我们对两次点云扫描进行匹配。我们的目标是通过点云旋转和平移来最大限度地降低这一平均距离误差,就可以在传感器扫描和地图之间找到匹配,将通过传感器扫描到的车辆位置转换为全球地图上的位置并计算出在地图上的精确位置。
视觉定位
图像是要收集的最简单的数据类型,摄像头便宜且种类繁多、易于使用。通过图像实现精确定位却非常困难,实际上摄像头图像通常与来自其他传感器的数据相结合以准确定位车辆,将摄像头数据与地图和 GPS 数据相结合,比单独使用摄像头图像进行定位的效果更好。

视觉定位的优点在于图像数据很容易获得,缺点在于缺乏三维信息和对三维地图的依赖。
高精地图不仅可以减少计算需求,还可以通过提供有关驾驶环境的详细信息,来确保无人车的安全。
保持这些地图的更新是一项重大任务,测试车队需要不断地对高精度地图进行验证和更新。
此外,这些地图可能达到几厘米的精度,这是水准最高的制图精度。
Apollo定位
Apollo使用基于GPS、IMU、激光雷达的多传感器融合定位系统,这种方法利用了不同传感器的互补优势,也提高了稳定性和准确性。
Apollo定位模块依赖于IMU、GPS、激光雷达、雷达、高精地图,这些传感器同时支持 GNSS 定位和LiDAR 定位,GNSS 定位输出位置和速度信息,LiDAR 定位输出位置和行进方向信息。融合框架通过卡尔曼滤波将这些输出结合在一起。







 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)