模块详解 | Apollo 8.0新特性解读之感知框架
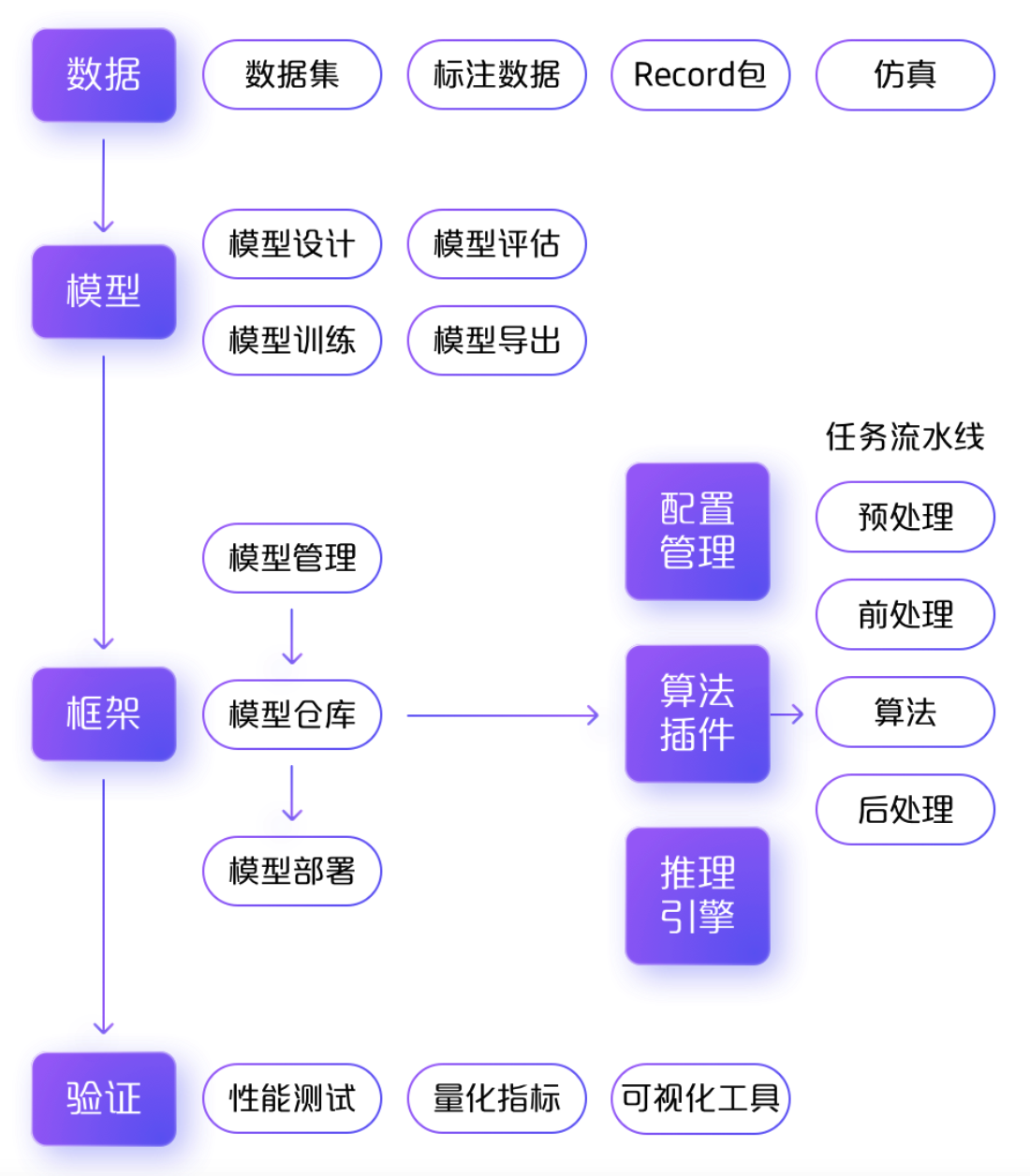
在自动驾驶系统中,感知模块主要负责识别车辆周围的障碍物以及交通标识等,因此感知算法的好坏直接关系到自动驾驶的安全性,而如何更快地迭代开发感知算法就成为了关键。为帮助开发者更好地提升感知模块的开发效率,在Apollo 8.0版本中,我们提供了一套完整的端到端自动驾驶感知开发流程,在数据、模型、框架和验证4个主要环节都做了提升,同时迭代优化了任务流程和工具,帮助开发者快速实现自动驾驶感知的开发、部署和
在自动驾驶系统中,感知模块主要负责识别车辆周围的障碍物以及交通标识等,因此感知算法的好坏直接关系到自动驾驶的安全性,而如何更快地迭代开发感知算法就成为了关键。为帮助开发者更好地提升感知模块的开发效率,在Apollo 8.0版本中,我们提供了一套完整的端到端自动驾驶感知开发流程,在数据、模型、框架和验证4个主要环节都做了提升,同时迭代优化了任务流程和工具,帮助开发者快速实现自动驾驶感知的开发、部署和验证,提高了感知模块的易用性和开发效率。
主要升级点
4.感知模型管理和部署效率提升:引入模型Meta信息,标准化模型输入输出,增加了模型管理工具,开发者可以通过命令实现模型安装、卸载、查看等。
详细介绍
一、感知框架
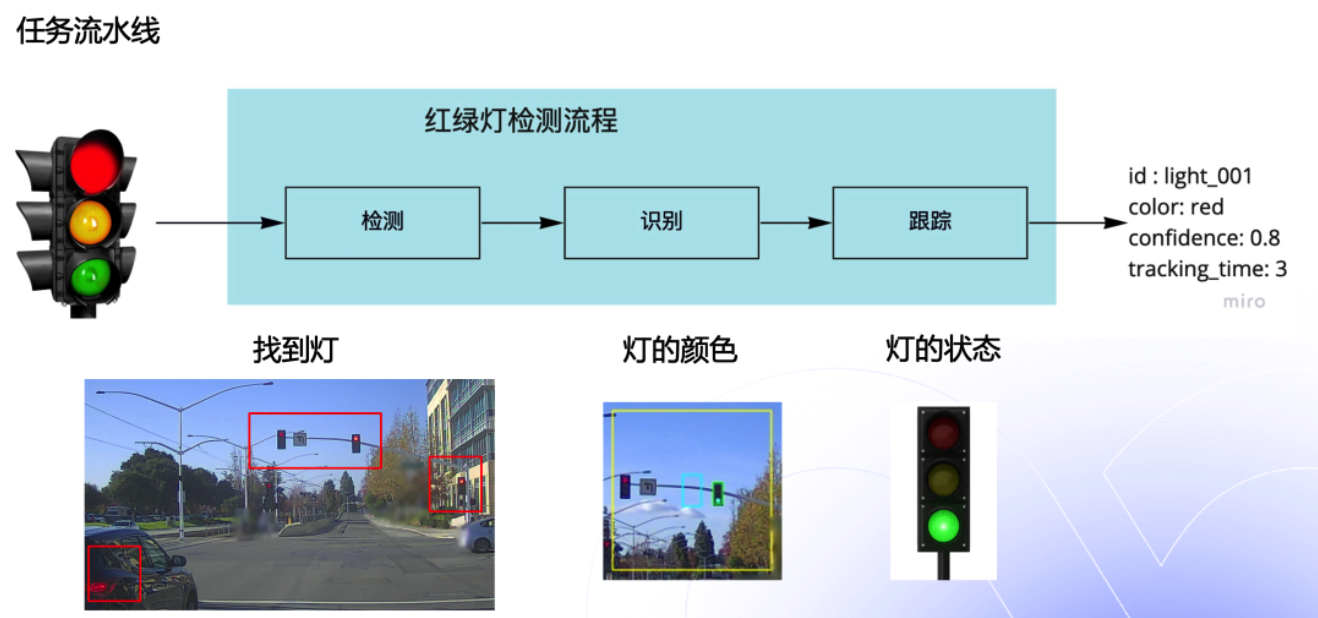
1. 任务流水线
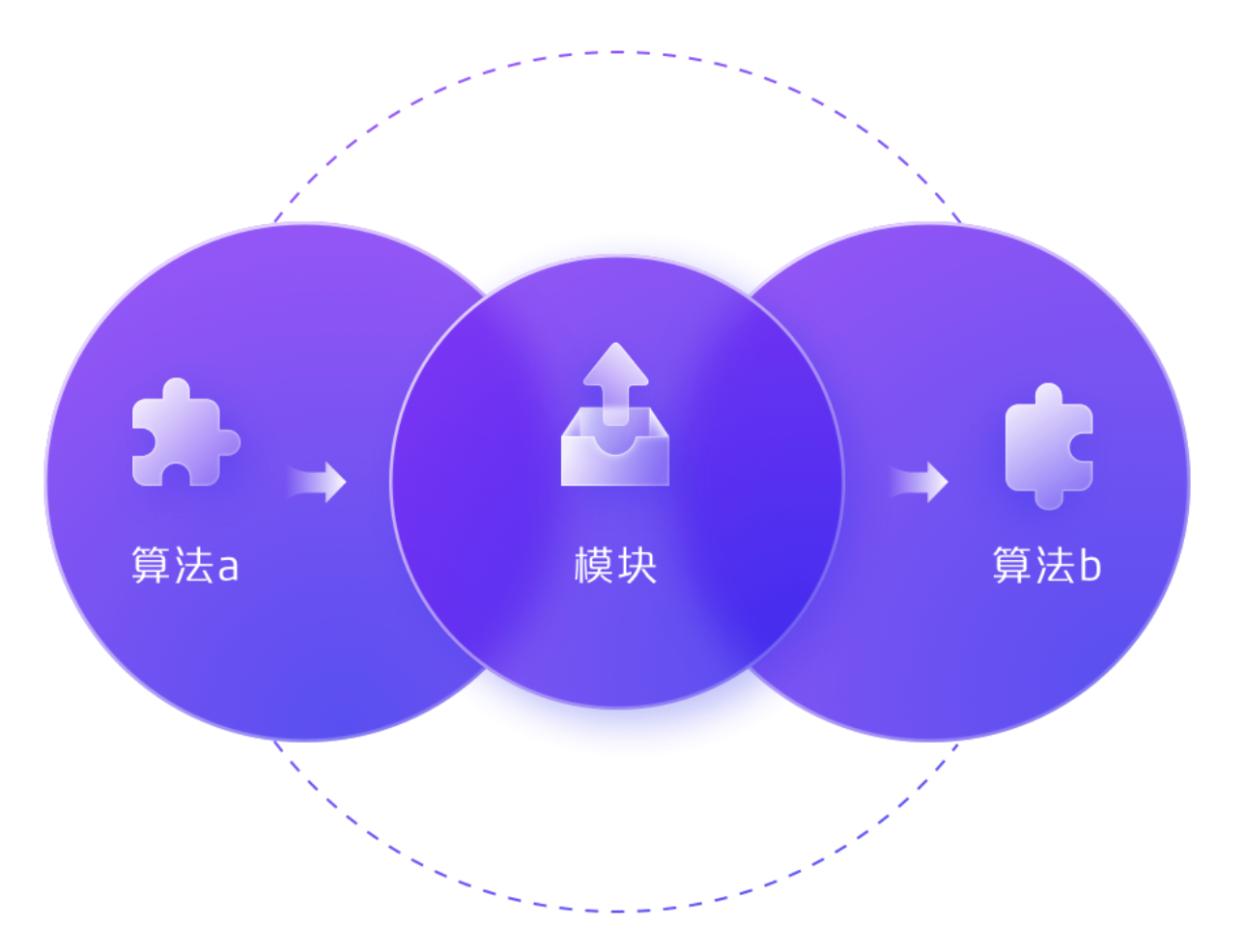
2. 算法插件
在8.0感知框架中,开发者可以根据需要选择不同的算法插件,比如Apollo感知模块提供4种检测器,开发者可以根据配置文件,选择不同的检测器,来验证检测效果。通过最新的算法插件,算法工程师更加专注于算法本身,而不需要过多关注框架的实现。
二、感知模型与验证
1. 模型训练
自动驾驶算法日新月异,在此次Apollo 8.0中,Apollo联合Paddle3D为开发者提供了端到端的自动驾驶模型开发解决方案,覆盖了从自动驾驶数据集到模型训练、模型评估和模型导出的算法开发全流程。
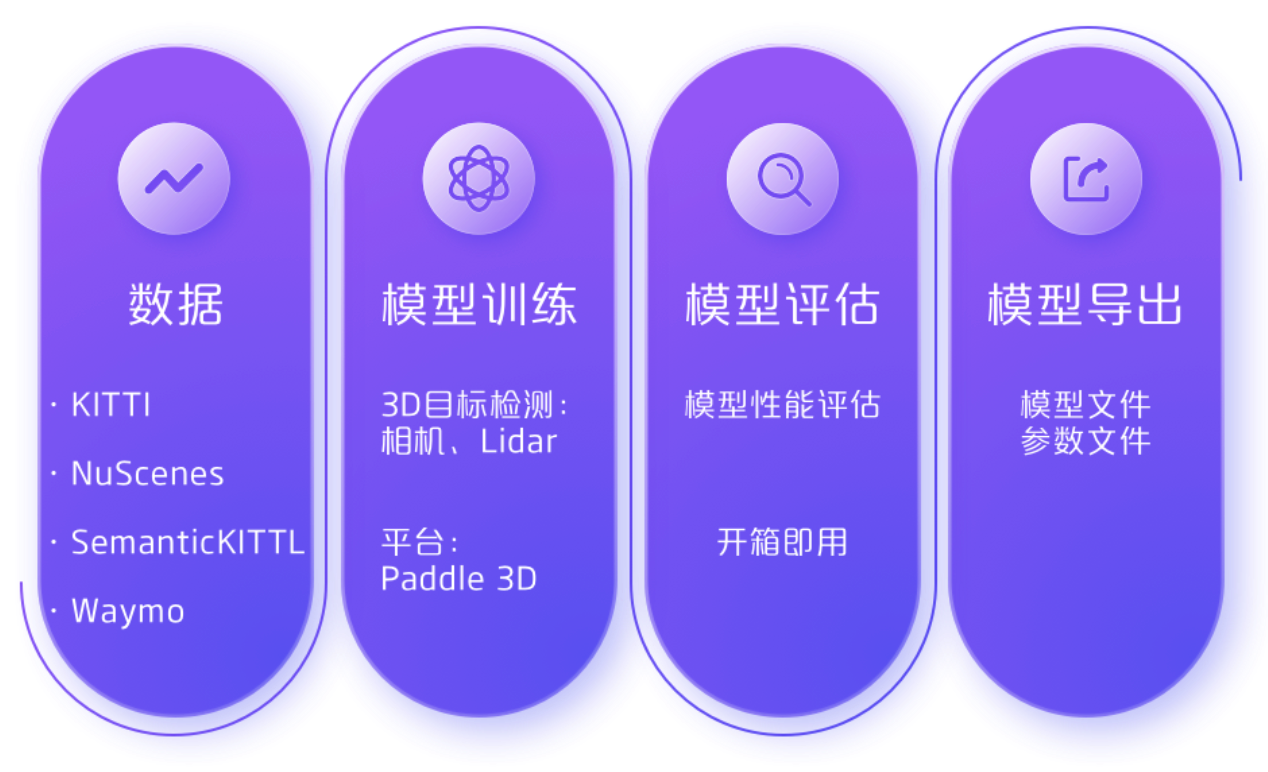
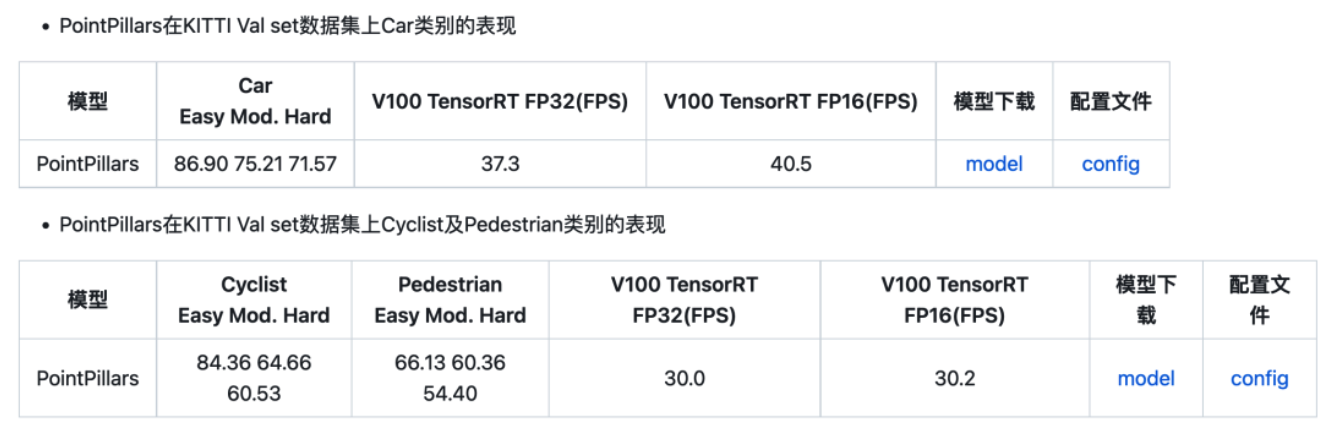
对于开发者比较关心的3D目标检测任务和分割任务,Apollo提供了最新SOTA的算法模型实现,包括单目相机检测、激光雷达点云目标检测和多模态的目标检测模型,可以让开发者开箱即用,不用苦于自己再复现模型了。同时,我们还提供了模型的Benchmark,包括速度、精度等指标以及预训练好的模型。开发者可以实时跟踪最新的3D目标检测和分割模型实现,保持自动驾驶感知算法上的先进性。
2. 新模型引入
CaDDN:基于单目3D检测的前沿模型,针对于单张图像预测3D物体的病态问题,CaDDN创新性地提出了使用每个像素的预测分类深度分布,将丰富的上下文特征信息投射到3D空间中适当深度区间的解决方案,并使用计算效率高的鸟瞰投影和单级检测器来生成最终的输出包围框,将单目3D的模型指标提到了一个新的高度,在KITTI数据中达到了较高的精度指标(Car类别3D AP 21.45 14.36 12.57)。
3. 模型管理
为了开发者更方便的将训练好的模型部署到Apollo系统中,在此次Apollo 8.0中我们引入了模型Meta和模型管理。其中,模型Meta中包含了模型的基本信息,如名称、任务类型、传感器类型、框架和训练所需的数据集,同时还包含了模型的标准输入、输入、前后处理、模型文件存放的路径等。通过这些信息对模型进行标准化,开发者只需要保证模型的输入和输出一致,就可以直接替换模型从而提升模型开发效率。
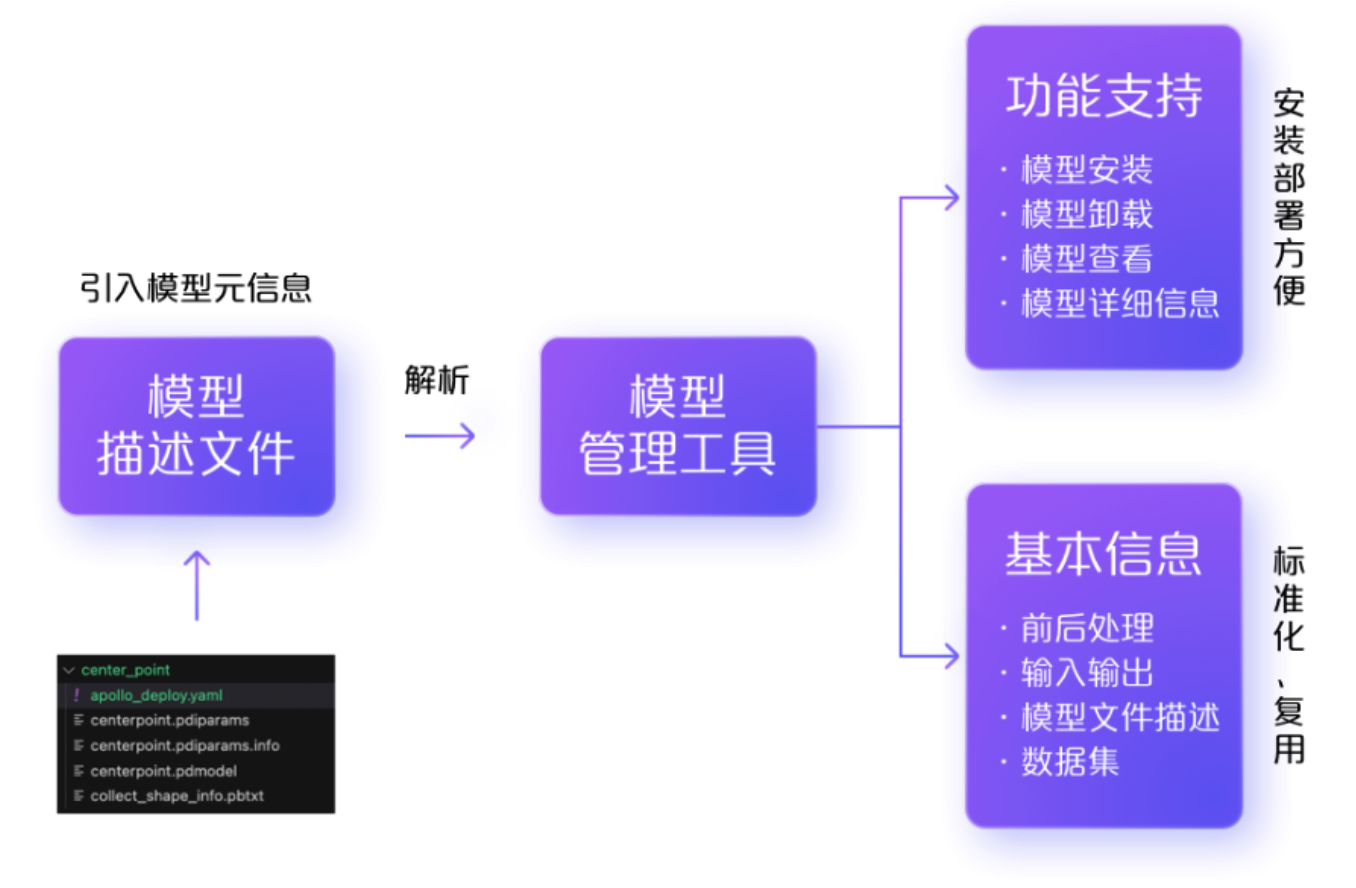
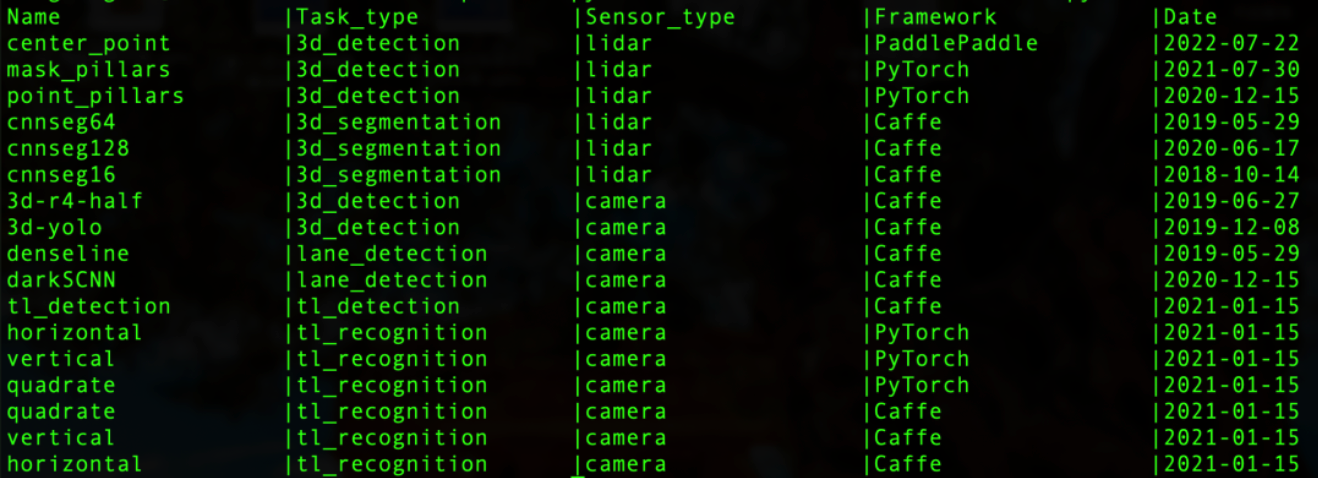
同时,Apollo 8.0还提供了模型管理工具,开发者可以通过该工具下载安装模型仓库中的模型,展示系统中已经安装的模型和模型的详细信息。通过对模型进行标准化和模型管理工具,开发者可以非常方便的安装部署训练好的模型,并且管理这些模型,实现模型部署效率提升。
4. 模型验证
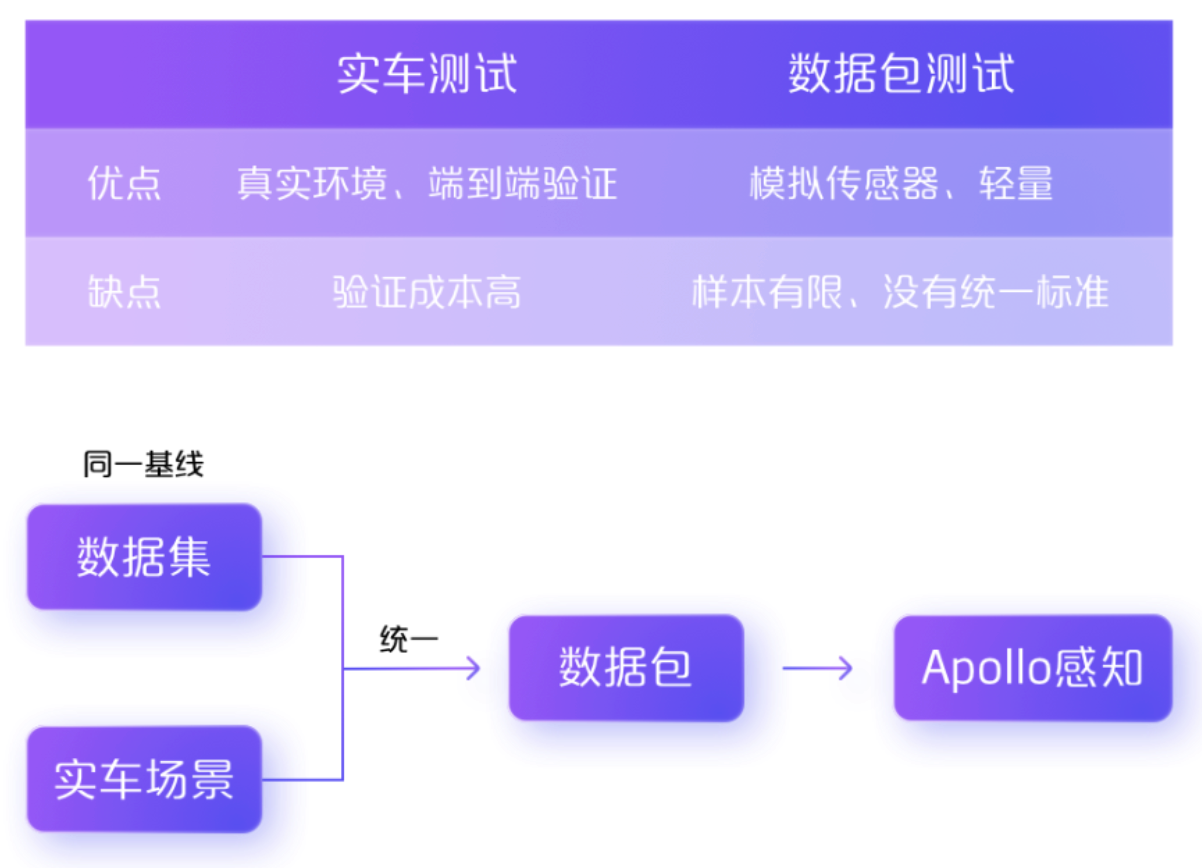
在Apollo自动驾驶系统中模型部署完成后,我们提供了基于数据集的数据包(record文件),方便开发者直接基于数据集的数据来在线验证模型的检测效果,保证训练和部署是同一套基线,快速测试模型性能。
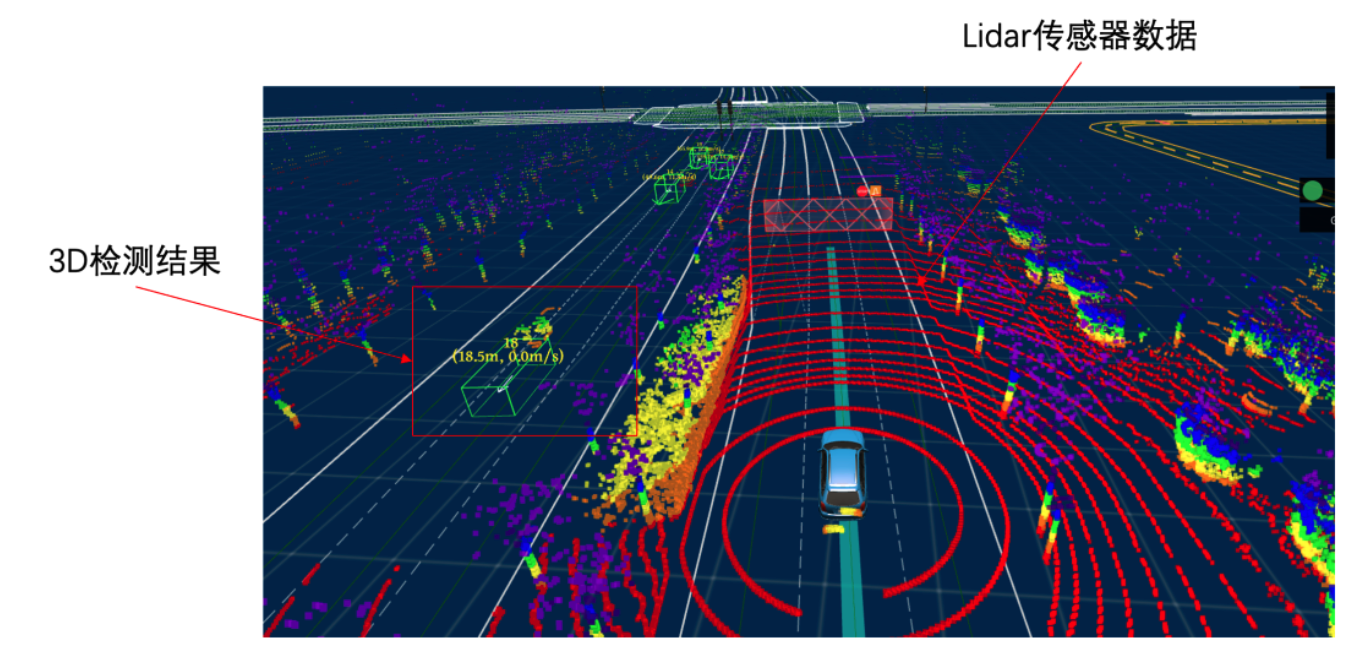
除了提供测试数据包之外,Apollo 8.0还提供了可视化工具链,通过可视化的图形界面,展示传感器的原始数据和目标检测结果,方便开发者查看模型检测效果,调试感知模型。
三、安装使用
(https://apollo.baidu.com/community/Apollo-Homepage-Document/Apollo_Doc_CN_8_0?doc=%2F%25E5%25BA%2594%25E7%2594%25A8%25E5%25AE%259E%25E8%25B7%25B5%2F%25E4%25BD%25BF%25E7%2594%25A8Apollo%25E8%25BF%259B%25E8%25A1%258C%25E6%2584%259F%25E7%259F%25A5%25E6%2589%25A9%25E5%25B1%2595%25E5%25BC%2580%25E5%258F%2591%2Flidar%25E8%25AE%25AD%25E7%25BB%2583%25E5%2588%25B0%25E9%2583%25A8%25E7%25BD%25B2quick%2520start )

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐



 0
0 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)