百度Apollo1.0快速开始指南
Apollo 1.0 快速开始指南关于指南阿波罗1.0快速入门指南提供了理解、安装和构建阿波罗的所有基本指令。概述Apollo“Apollo”计划为其在汽车和自主驾驶行业的合作伙伴提供一个开放、全面、可靠的软件平台。合作伙伴可以使用阿波罗软件平台和阿波罗认证的参考硬件作为模板来定制他们自己的自动驾驶汽车。阿波罗1.0,也被称为自动GPS导航点,它在一个封闭的场所如测试轨道或停车场工作,它准确地再
Apollo 1.0 快速开始指南
关于指南
阿波罗1.0快速入门指南提供了理解、安装和构建阿波罗的所有基本指令。
概述Apollo
“Apollo”计划为其在汽车和自主驾驶行业的合作伙伴提供一个开放、全面、可靠的软件平台。合作伙伴可以使用阿波罗软件平台和阿波罗认证的参考硬件作为模板来定制他们自己的自动驾驶汽车。
阿波罗1.0,也被称为自动GPS导航点,它在一个封闭的场所如测试轨道或停车场工作,它准确地再现了一个人类驾驶员在一个封闭的、平坦的地面上行驶的轨迹和轨迹的速度。
在这个发展阶段,Apollo1.0不能近距离地感知障碍物,在公共道路上行驶,或者在没有GPS信号的区域驾驶。
描述车辆环境
林肯MKZ,结合Autonomous Stuff,为用户提供了一个可访问的自动车辆平台。该平台为用户提供了一套全面的硬件和软件解决方案。
用户可以直接访问车辆控制系统,如设备的选择、速度和指示灯。软件界面已经被创建,用于指导、刹车、加速和设备选择,为开发人员提供一个可行的用户界面。
附加功能包括:
- 电力分配器终端
- ROS,PC的预安装和配置
- 紧急停车用线控系统
- 以太网和USB连接(到PC)
硬件安装
有关安装硬件组件和系统软件的步骤,请参阅Apollo1.0硬件和系统安装指南。
软件安装
本节包括:
- 下载阿波罗发布包
- 配置Docker
- 自定义你自己的容器
在开始之前,请确保您已经根据Apollo1.0的硬件和系统安装步骤,安装了Ubuntu Linux 14.04.3和Apollo的内核。
Apollo源码下载
1.从GitHub下载Apollo源代码
git clone git@github.com:ApolloAuto/apollo.git
cd apollo2.设置环境变量APOLLO_HOME
echo "export APOLLO_HOME=$(pwd)" >> ~/.bashrc && source ~/.bashrc3.打开一个新的终端或在现有的终端运行
source ~/.bashrc在接下来的章节中,我们假定阿波罗目录就是$APOLLO_HOME。
配置Docker
Docker容器是为阿波罗设置构建环境的最简单的方式。
要了解更多信息,请参阅这里详细的Docker教程。
1.运行以下命令来安装Docker:
cd $APOLLO_HOME
bash docker/scripts/install_docker.sh2.(可选)如果您已经安装了Docker(在安装了阿波罗内核之前),请在/etc/default/Docker添加以下一行:
DOCKER_OPTS = "-s overlay自定义你自己的容器
1.通过运行以下命令下载并启动阿波罗的docker映像:
cd $APOLLO_HOME
bash docker/scripts/release_start.sh2.登陆到docker容器
bash docker/scripts/release_into.sh3.设置全球导航卫星系统(GNSS)驱动的区域编号,修改./ros/share/gnss_driver/launch/gnss_driver.launch文件中的这一行:
<arg name="proj4_text" default="+proj=utm +zone=10 +ellps=WGS84 +towgs84=0,0,0,0,0,0,0 +units=m +no_defs " />
你只需要修改+zone=10,请参考Apollo的坐标系统来找到你的本地区域号码。例如,如果你在北京,中国,你必须设置+zone=50。
4.设置GNSS驱动程序的Real Time Kinematic (RTK)基站,修改/ros/share/gnss_driver/conf/gnss_conf_mkz.txt
rtk_from {
format: RTCM_V3
ntrip {
address: <provide your own value>
port: <provide your own value>
mount_point: <provide your own value>
user: <provide your own username>
password: <provide your own password>
timeout_s: <provide your own value, e.g., 5>
}
}
rtk_to {
format: RTCM_V3
serial {
device: <provide your own value, e.g., "/dev/ttyUSB1">
baud_rate: <provide your own value, e.g., 115200>
}
}rtkfrom用于RTK基站信息。
rtkto用于将RTK的微分数据发送给接收方。
5.添加 ESD CAN
6.保存更改
# RUN OUT OF DOCKER ENV
# commit your docker local changes to local docker image.
exit # exit from docker environment
cd $APOLLO_HOME
bash docker/scripts/release_commit.sh在车辆上运行demo
这一节说明如何在车上运行Apollo1.0
1.配置硬件:
- 开启平台车
- 开启IPC
- 在调制解调器上按下电源按钮,直到灯打开。
- 设置IPC的网络配置:静态IP(例如,192.168.10.6)、子网掩码(例如255.255.255.0)和网关(例如,192.168.10.1)
- 配置您的DNS服务器IP(例如,8.8.8.8)。
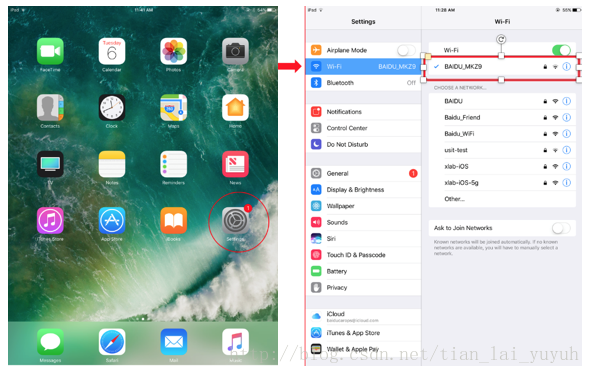
- 使用平板电脑访问设置,并连接到MKZ wifi:
2.在Docker容器中启动HMI
Note:请确保您不是同时从两个Docker容器中启动HMI。
启动本地环境的Docker镜像
运行以下命令:
cd $APOLLO_HOME
bash docker/scripts/release_start.sh local当Docker开始时,它会创建一个端口映射,它将Docker内部端口8887映射到主机端口8887。然后,您可以在主机浏览器中访问HMI web服务:打开谷歌浏览器,访问192.168.10.6:8887。
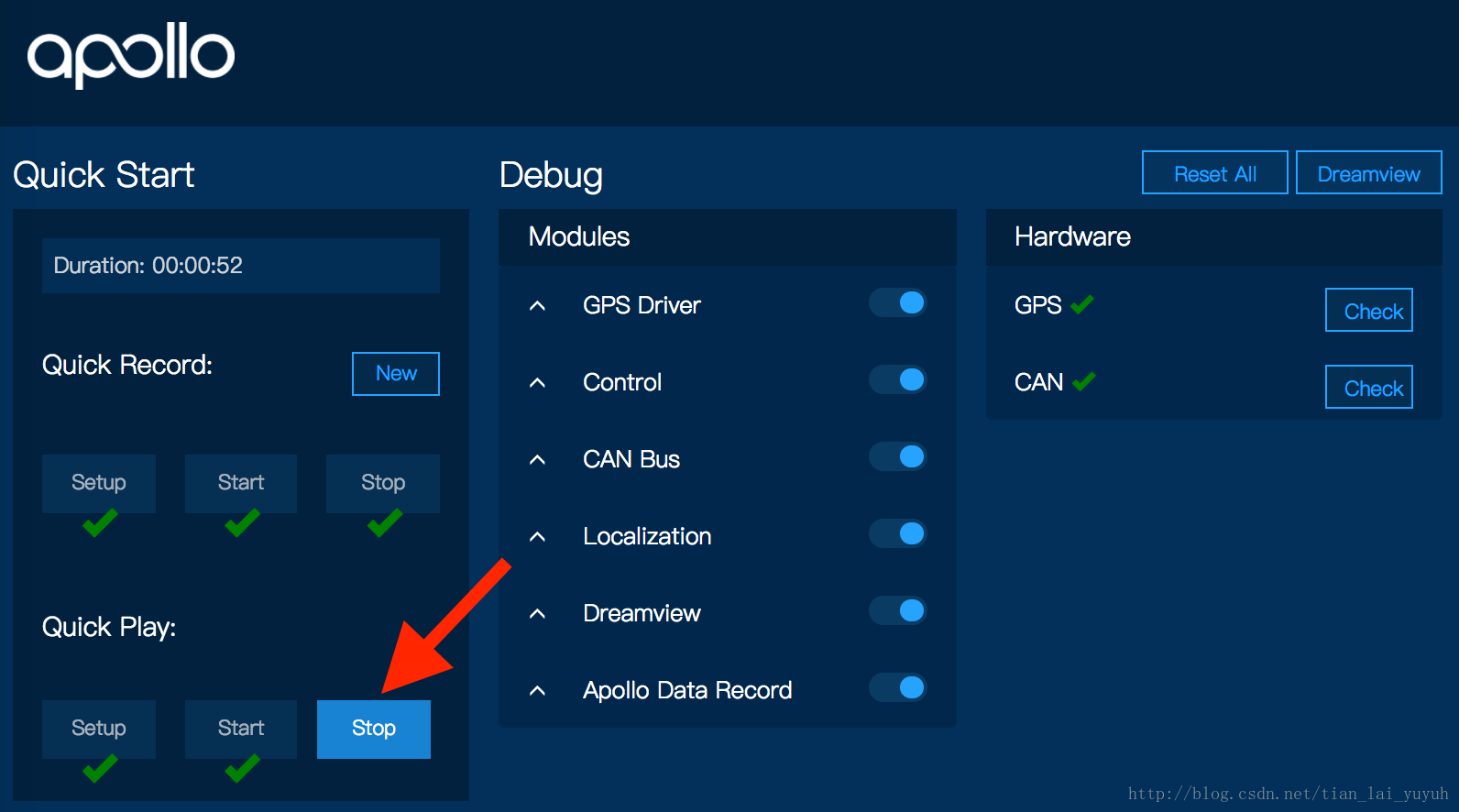
记录驾驶轨迹
按照以下步骤来记录驾驶轨迹:
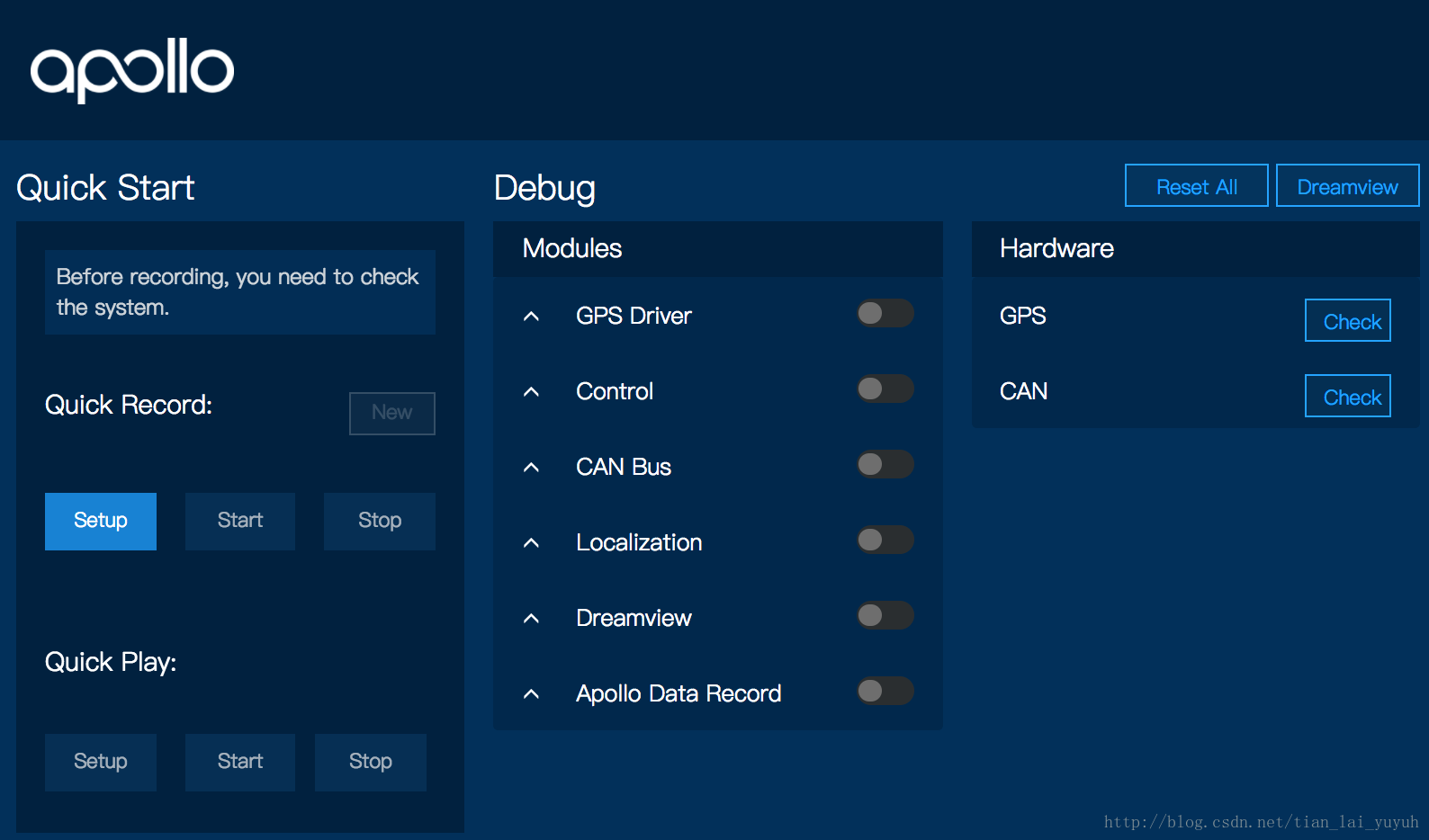
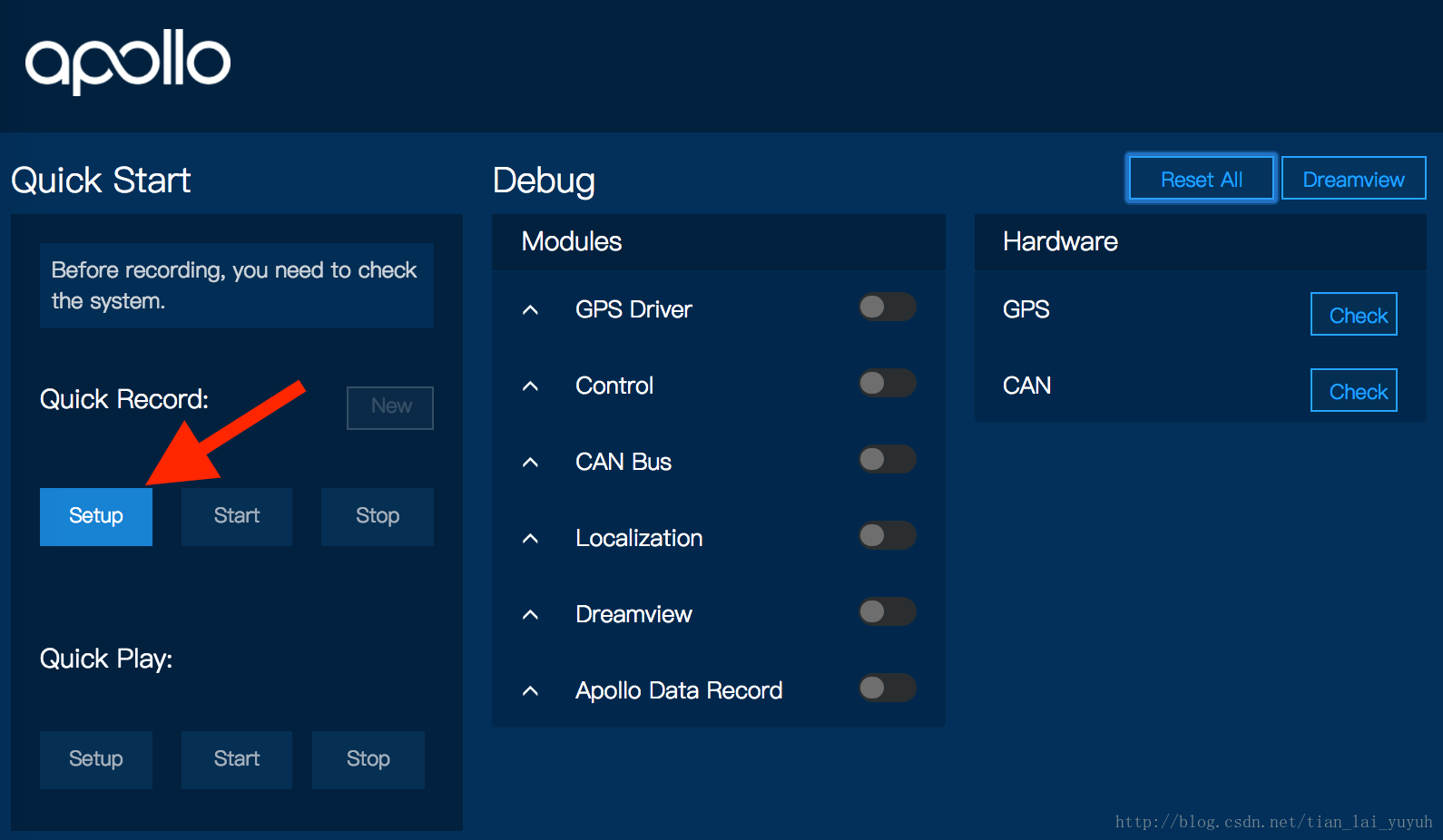
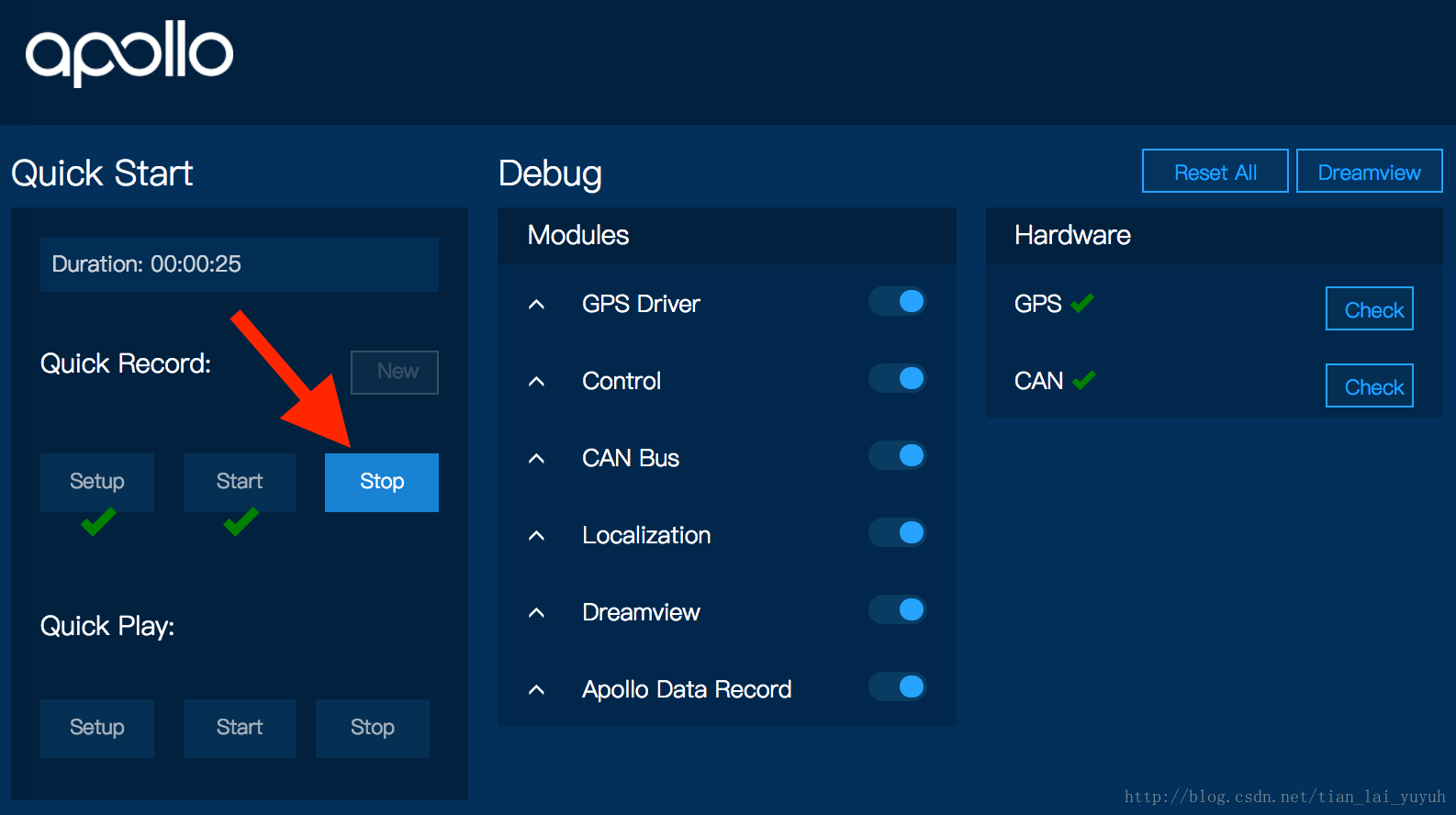
1.在阿波罗HMI中,在Quick Record下,单击设置以启动所有模块并执行硬件健康检查。
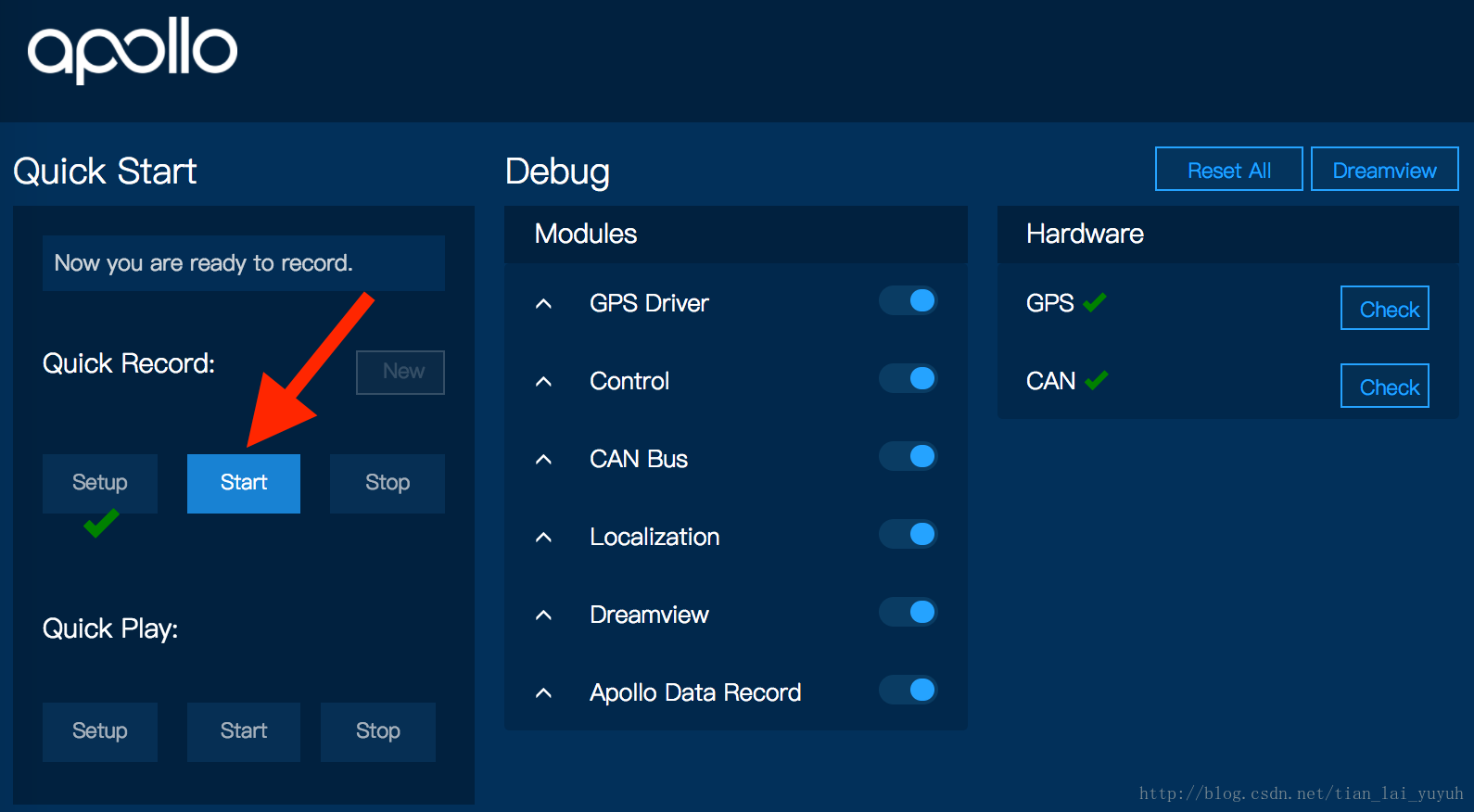
2.如果硬件健康检查通过,单击Start按钮开始记录驱动程序的轨迹
3.到达目的地后,单击Stop按钮停止记录
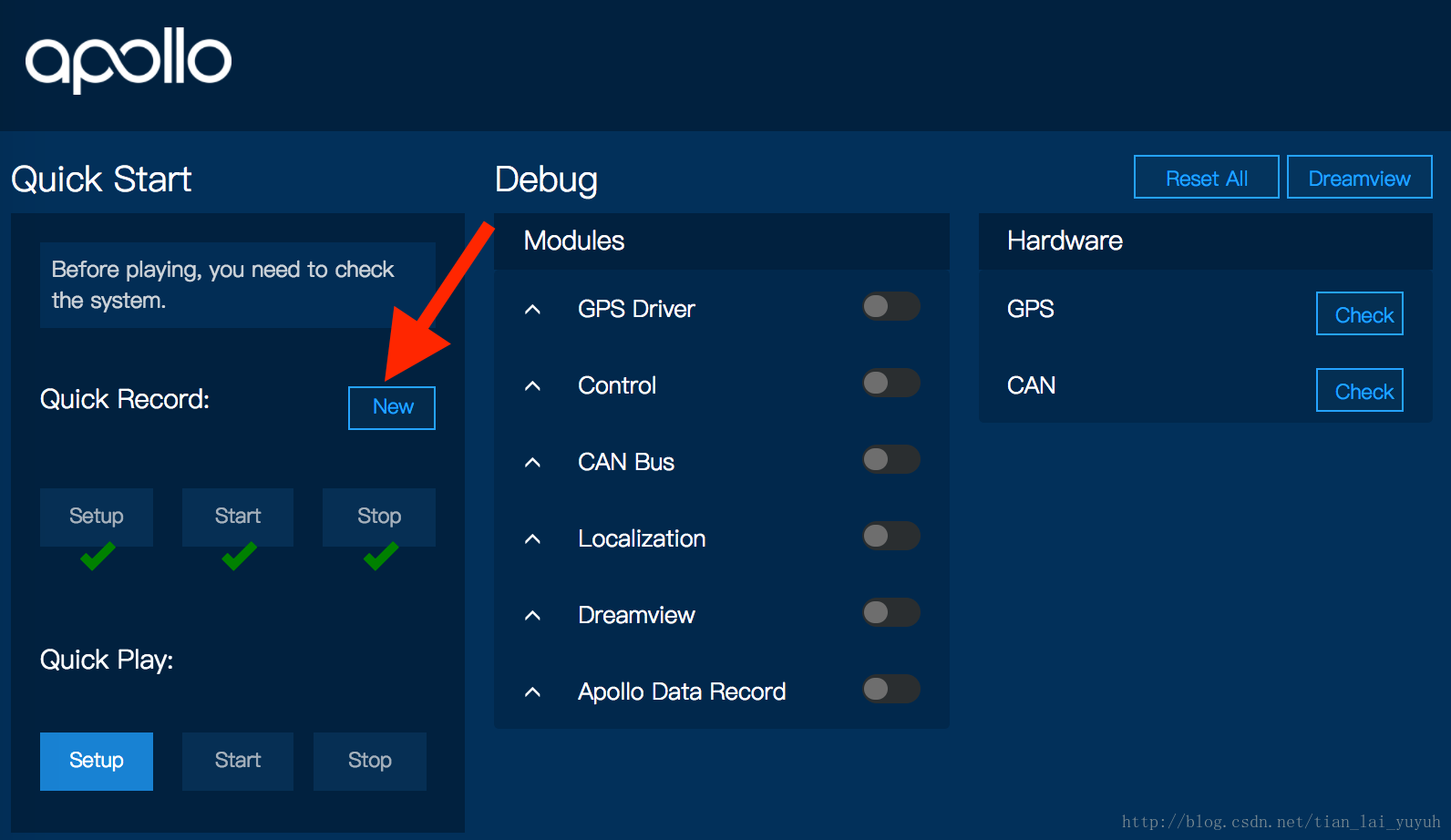
4.如果你想要记录一个不同的轨迹,点击这个新按钮来重新开始录制。
执行自动驾驶
按照以下步骤进行自动驾驶:
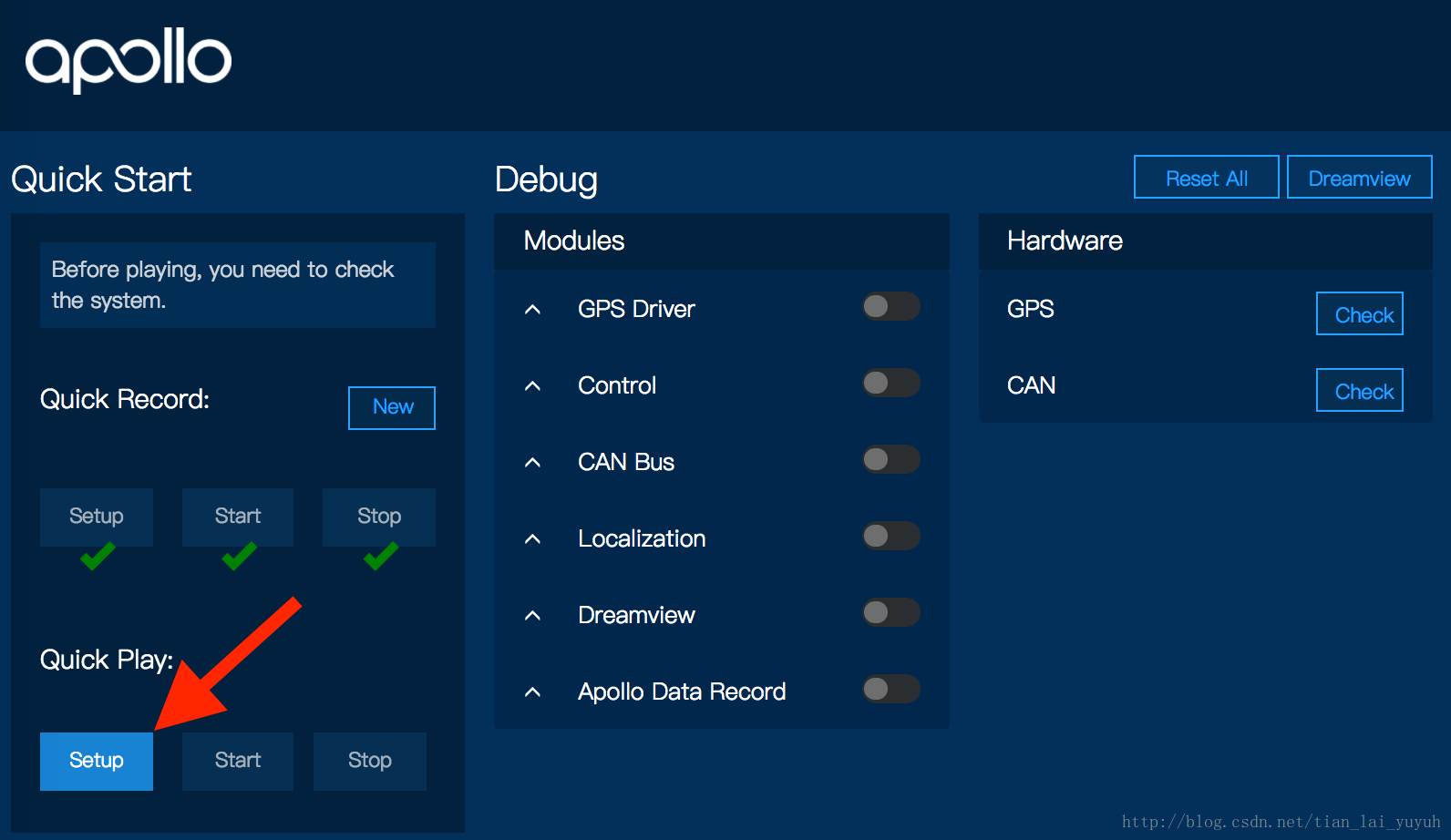
1.在阿波罗HMI中,在Quick Play下,点击设置来启动所有模块并执行硬件健康检查。
2.如果车辆成功地通过了安装步骤,它就可以进入自动模式了。确保司机已经准备好了!单击开始按钮启动自动驾驶。
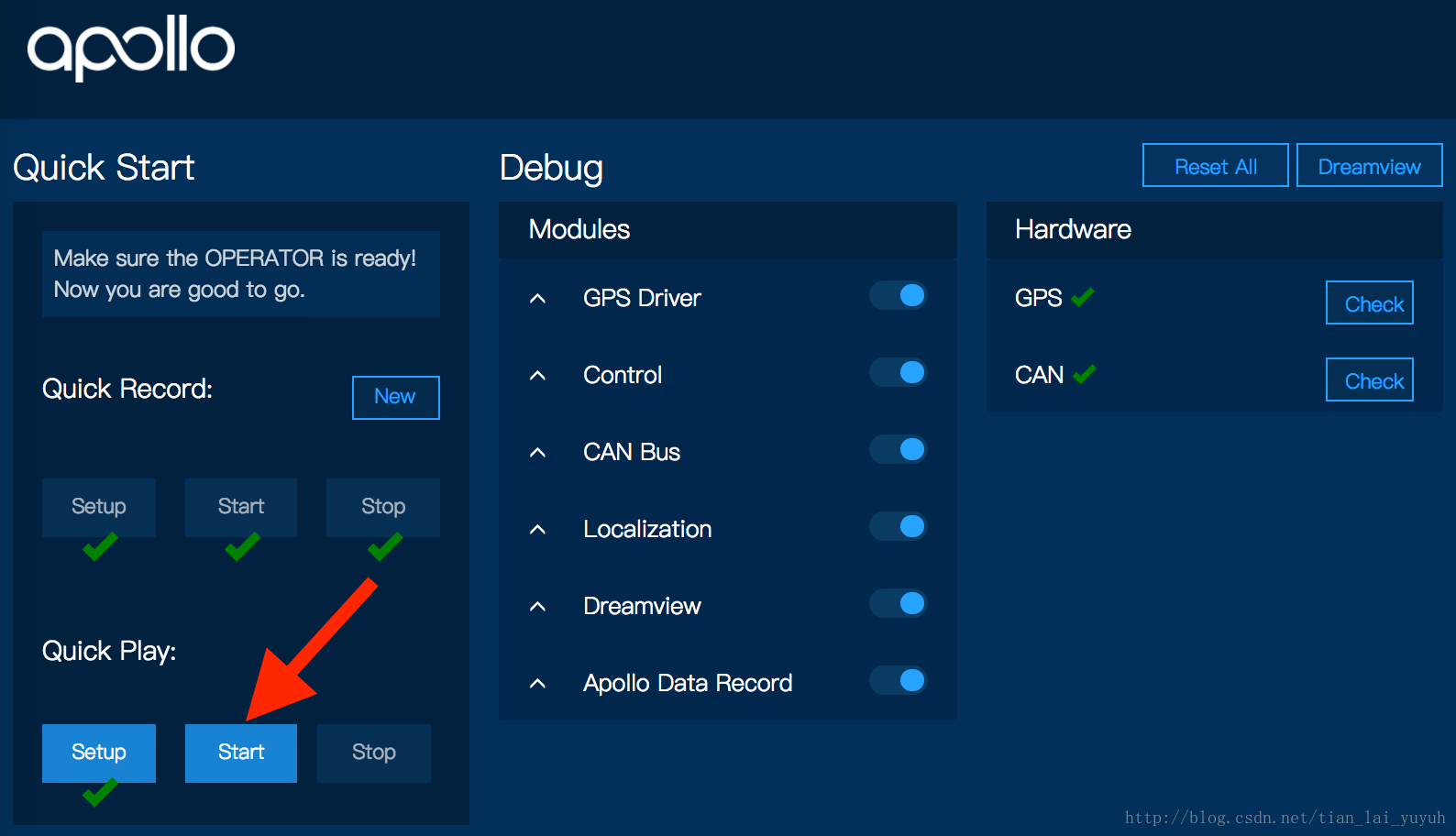
3.到达目的地后,点击“停止”按钮,停止重新播放已录制的轨迹。
关闭
- 从终端关闭系统:
sudo shutdown now - 关闭IPC(在桌面的右上角找到图标,点击关闭)。
- 关闭调制解调器,按下电源按钮,直到灯关闭。
- 关掉车。
运行离线的DEMO
参考链接

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐


 3
3 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)