自动驾驶(七十七)---------Apollo平台介绍
目前Apollo已经更新到6.0,整体架构和功能都已经很成熟了,Apollo开源无疑极大的提高了自动驾驶行业的整体水平,所以对于研究自动驾驶的人来说,apollo可以说是入场券,最近应该是我比较轻松的时间,准备系统的学习一下Apollo的代码和思想,过完年去新公司应该会比较忙了。1. Apollo与ROSApollo项目基于ROS,但是对其进行了改造,主要包括下面三个方面:通信性能优化:将通过共享
·
目前Apollo已经更新到6.0,整体架构和功能都已经很成熟了,Apollo开源无疑极大的提高了自动驾驶行业的整体水平,所以对于研究自动驾驶的人来说,apollo可以说是入场券,最近应该是我比较轻松的时间,准备系统的学习一下Apollo的代码和思想,过完年去新公司应该会比较忙了。
1. Apollo与ROS
Apollo项目基于ROS,但是对其进行了改造,主要包括下面三个方面:
- 通信性能优化:将通过共享内存来减少数据拷贝,以提升通信性能。
- 去中心化网络拓扑:Apollo使用RTPS服务发现协议实现完全的P2P网络拓扑。
- 数据兼容性扩展:ROS通过msg定义接口,但是接口升级之后不同的版本的模块难以兼容,因此Apollo选择了Google的Protocol Buffers格式数据来定义接口。
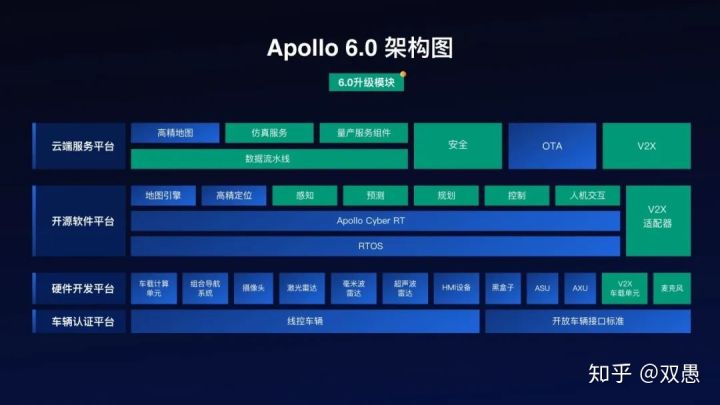
2. 软件架构图
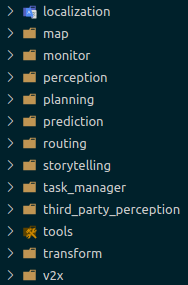
3. 模块介绍
apollo目前现有的模块如图: 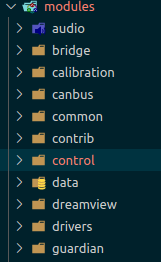
下面每个模块做一个简单介绍,重要的模块单独写一篇文章来分析。
- audio:音频模块,用来检测能否激活车辆紧急状态时的警报器声音,该模块主要输出警报器的开/关状态、移动状态和警报器的相对位置。
- bridge:桥接模块,该模块为其他阿波罗模块提供了一种通过socket与Apollo外部进程交互的方法,包括发送方和接收方组件。
- calibration:标定模块,包含车身、摄像头、激光雷达、定位、感知、雷达等等一系列的参数,注意这里只有参数的结果,没有标定的工具和方法。
- common:公共模块,包含通讯、配置、滤波器、记录模块、数学、log系统、车辆状态等子模块。
- contrib:apollo的有益贡献,包含Google的Protobuf定义消息、tcp桥接模块、自定位系统(GPS和百度高精地图融合)。
- control:控制模块,根据规划和车辆状态,来控制车辆驾驶。
- data:数据记录模块,特别的,数据较小的模块都记录:定位、车速等,数据很大的只在特定场景记录:点云、摄像头等。
- dreamview:画图模块,提供web端的可视化模块。
- driver:驱动模块,包含摄像头、can总线、gps、雷达、手机、等驱动文件。
- guardian:系统检测保护。
- localization:定位模块,可以是直接基于RTK的信号,也可以是gps+imu+激光雷达等多传感器融合定位。
- map:地图模块,可以是直接用百度的高精地图,也可以是基于传感器的实时地图。
- monitor:监视器模块,功能包含:各模块的运行状态、数据完整性、监测数据频率、CPU、内存、磁盘使用情况、生成端到端的延迟统计报告等。
- perception:检测模块,主要作用是检测和分类基于摄像头、雷达(前后)、LiDAR的障碍物,6.0提供基于PointPillars的训练模型。
- planning:规划模块,6.0不同场景采用不同的参数集,例如:路口、公共道路、靠边停车、紧急情况等。规划包含轨迹和速度两块的规划。
- prediction:预测模块,预测感知到的所有对象的行为,包含位置、方向、速度、加速度、轨迹等。
- routing:导航模块,根据地图和目的地,生成导航信息。
- storytelling:场景管理模块,不同的场景需要调用不同的模块相互工作,storytelling就是做这个协调和管理工作。
- task_manager:任务管理器。
- third_party_perception:第三方的检测模块,之前apollo自己的检测效果不好,借用了第三方的检测:Mobileye的视觉、 Conti/Delphi 的激光雷达等。
- tools:基于python的一些工具,不会作为一个节点独立运行。
- transform:坐标转换模块,相当于ROS中的tf2。
- v2x:车路协同,目前还不成熟。
今后我也会继续保持对该项目的关注,如果有更多的信息会继续分享给大家。

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐
 6
6 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)